univ.bacc.ing.comp. Vanja Smailović
Zagreb, FER
Email: vanja.smailovic@fer.hr
Mobitel: +38598 942 0395
univ.bacc.ing.el. Mijo Čikeš
Zagreb, FER
Email: mijo.cikes@fer.hr
Mobitel: +38598 196 3341

O aplikaciji
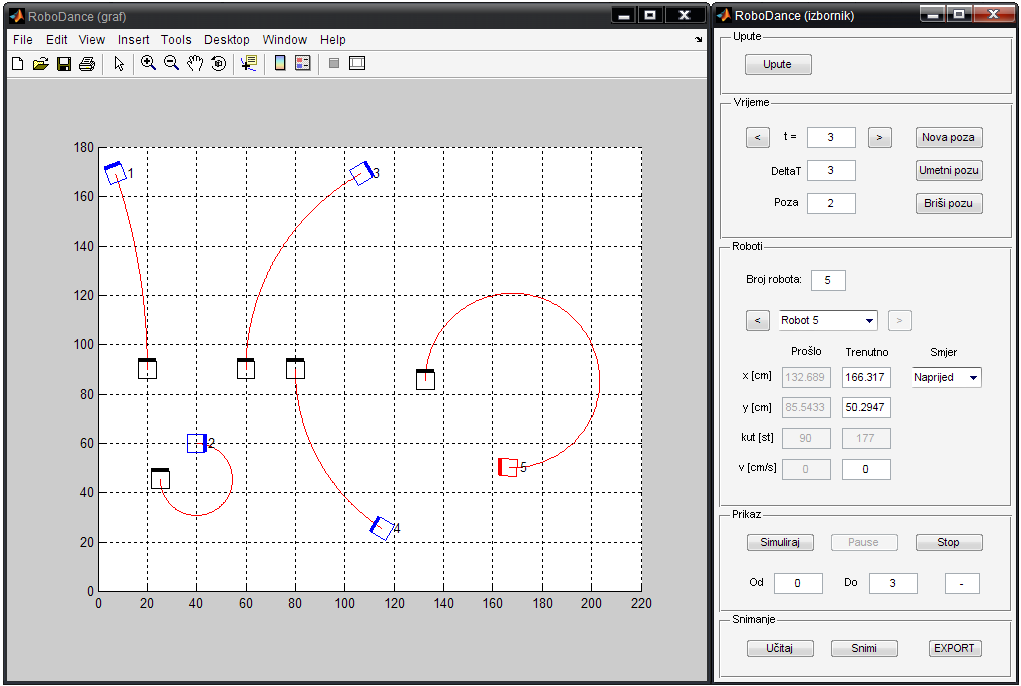
Grafičko sučelje aplikacije je pregledno i intuitivno, a omogućava niz funkcionalnosti kao što su učitavanje i spremanje koreografije, simuliranje koreografije koje uključuje animaciju uz reprodukciju zadane glazbene datoteke, i sl., sve sa svrhom omogućavanja korisniku da što kvalitetnije i jednostavnije napravi plesnu koreografiju, prije same izvedbe uživo.
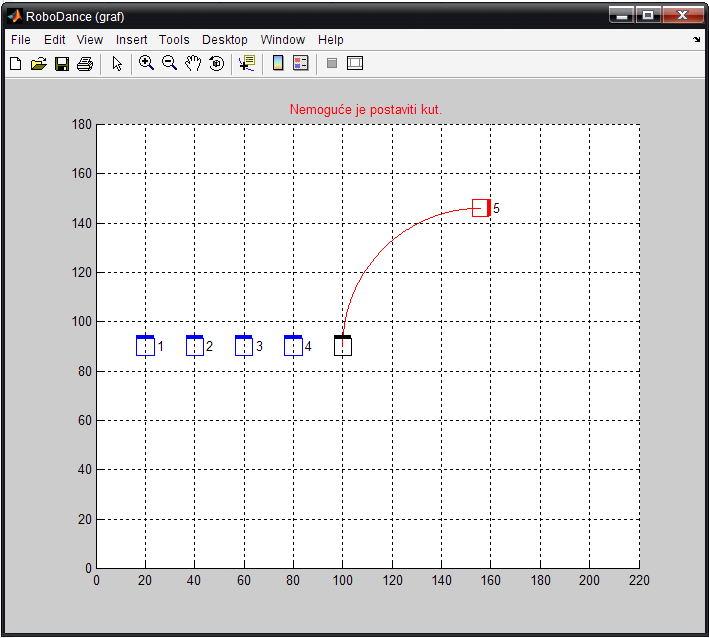
Rezultat pohranjene koreografije je izvođenje robotskog plesa, sinkronizirano sa glazbenom pozadinom, kao posljedica kompatibilnog rada između dvaju dijelova – korisničkog i upravljačkog. Ukoliko korisnik nije zadovoljan izvedenom koreografijom, moguće je učitati spremljenu koreografiju i izmijeniti sve nužno za poboljšanje iste, pazeći na moguće dojave grešaka koreografije te konstantno revidiranje simulacije plesa.
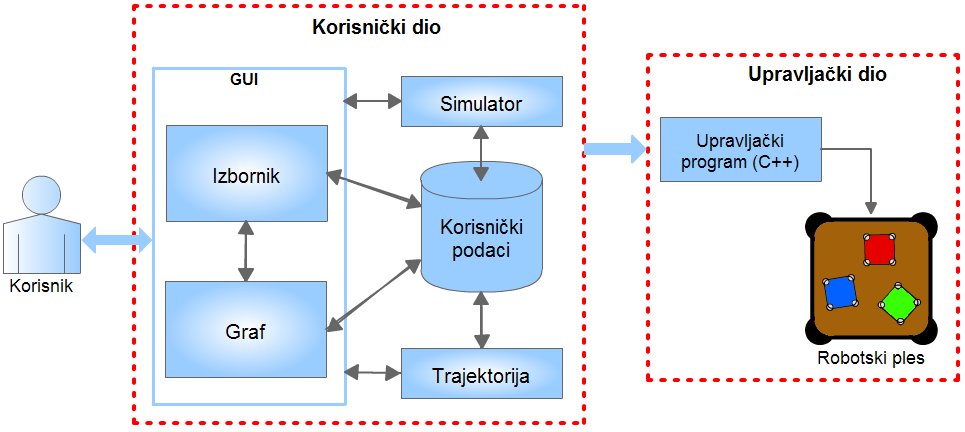
Sustav radi na način da se korištenjem aplikacije RoboDance unosi željena koreografija, unaprijed generiraju trajektorije za svakog robota, nakon čega odgovarajući regulator generira upravljačke signale koji omogućuju da roboti slijede zadane trajektorije. Sustav za potrebe testiranja i robotskog plesa koristi platformu za robotski nogomet. RoboDance je aplikacija za unos, pregled i pohranu koreografije plesa, predočene nizom poza potrebnih za ples robota. Svrha aplikacije je jednostavnije unošenje poza u računalo za najviše šest robota te stvarno-vremenski pregled unešene koreografije uz sinkronu reprodukciju glazbe. RoboDance je rađena u Matlabu, a sustav kojeg obilježava aplikacija je zapravo korisnički dio, zadužen za interakciju sa korisnikom, na kojeg se nastavlja upravljački dio, zadužen za upravljanje i izvedbu umjetničkog plesa, kao rezultata suradnje dotična dva sustava. Glavni cilj aplikacije je stvaranje plesne koreografije koja bi zadovoljila potrebe zamišljenog robotskog plesa, kao umjetničkog djela.
Roboti
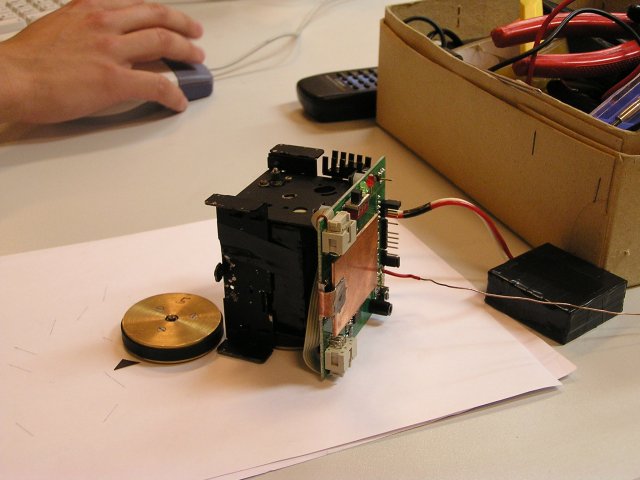
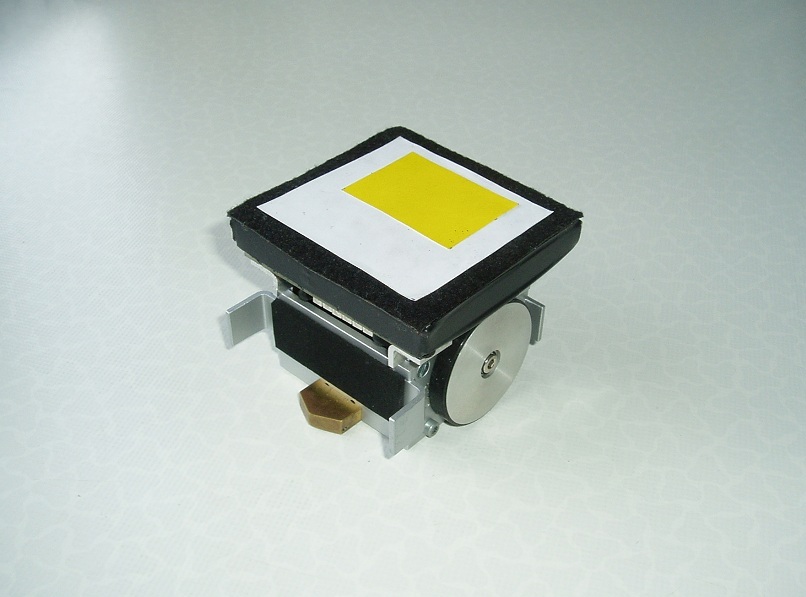
Roboti korišteni za robotski ples su roboti na diferencijalni pogon. Dimenzije robota su 7.5 × 7.5 cm, a kućište je izrađeno od laganog finog materijala. Kako bi težište bilo što niže, na dnu kućišta smješteno je baterijsko punjenje napona 11 V. Pogon robota se sastoji od dva kotača prevučena gumom koja su postavljena na glavnu osovinu i pogonjena sa dva odvojena DC motora. Kontaktni klizači na prednjem i stražnjem dijelu robota omogućuju stabilnost.
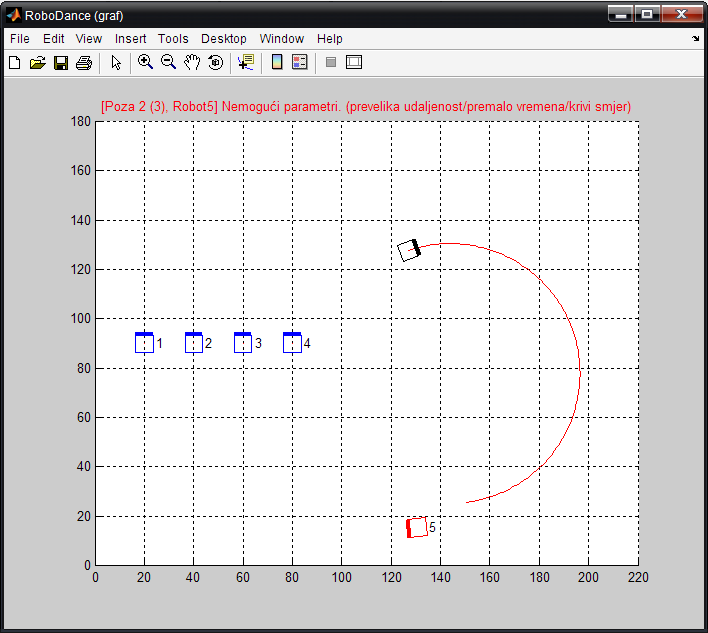
Kao senzor služi kamera (Basler A301FC Color Machine Vision Camera) koja je postavljena na udaljenosti otprilike 2,5 metra iznad terena na kojem se roboti gibaju. Kamera je spojena preko firewire sabirnice na vodeće računalo u kojem se vrti upravljački algoritam. Upravljačke naredbe se sa vodećeg računala, preko RF kartice, šalju robotu. Grafičko sučelje programa za upravljanje robotom prikazano je na slici.
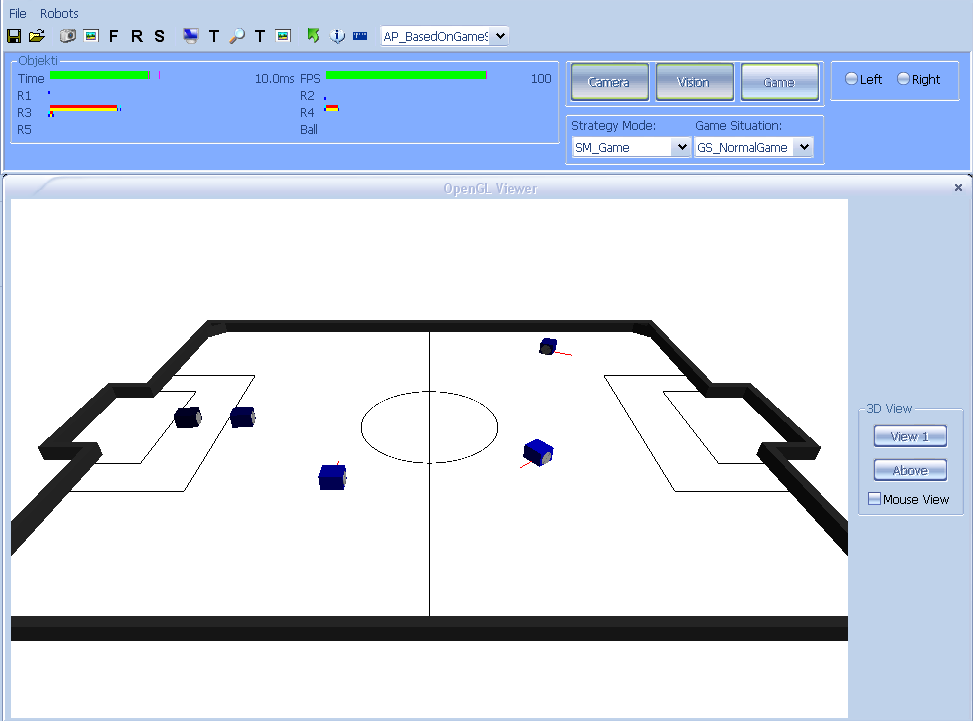
Slike